Design Optimization of 3-DOF Hybrid Manipulator
Main Article Content
Article Sidebar

Abstract
Studies related to reachable workspace, inverse kinematics, and best dimensions of 3-DoF (Degrees of Freedom) Hybrid Manipulator (HM) are presented in this paper. This mechanism possesses both serial and parallel links. A third revolute joint is added in the five-linkage structure having two actuated revolute joints. The third revolute joint is added in such a way that its axis should pass through the axes of the two actuated revolute joints. This produces a structure called a hybrid mechanism consisting of parallel and serial links.
A Hybrid mechanism consists of both serial and parallel links. Serial mechanisms are arranged as cantilever type of kinematic arrangement due to this arrangement serial mechanism suffers from lack of stiffness and positioning errors on the other hand parallel mechanisms have higher stiffness but possess less workspace. These drawbacks can be overcome by the hybrid manipulator. The accuracy and stiffness of the hybrid manipulator are found to be better than serial manipulators. X.Z. Zhang [1] introduced a parallel mechanism based on two kinds of 3-UPU hybrid serial-parallel manipulators. Each of the 3-UPU constitutes one base, one platform, and three limbs. Tian chunxu et al., [2] developed a spatial mechanism. The end-effector of this mechanism possesses two rotations and two translations, and the development of this novel hybrid mechanism helps to develop a more complicated mechanism. Hamid Rakhodaei [3] in his Ph. D work, discussed the design of a new configuration of a hybrid parallel robot with 9-DoF.
Fig.1 shows a five-bar, revolute (R)-coupled linkage, closed-chain type hybrid parallel manipulator. The θ1 and θ2 are the actuated joint variables, and the x, y coordinates of the revolute center P are the Cartesian variables. One more degree of freedom is imparted to the manipulator of Fig. 1 by adding one revolute joint to the above five bar closed chain manipulator. The fixed link AB of the above manipulator is coupled to the base of a new manipulator with the help of a revolute joint. This arrangement allows the two-DoF manipulator to rotate about line AB. Thus three-DoF hybrid manipulator is obtained as shown in Fig. 2
The inverse kinematics analysis is implemented for obtaining the joint positions of the hybrid manipulator. The reachable workspace of the manipulator is found using inverse kinematic equations and finally considering Global Conditioning Index (GCI) [4, 5] as the objective for optimization of the Hybrid Manipulator using Genetic Algorithms (GA’s)[6, 7].
Results and Discussion
For L0 = 0.6m, L1 = 0.8m and L2 = 0.5m the workspace of the Hybrid manipulator having 3-DoF is shown in Fig. 3.For the above Workspace (Fig. 3) the mean value of GCI is 0.69, whereas for the maximum value of GCI = 0.51 which is free from singularities and the minimum value of GCI is 1.2225e-04 which is closer to singularities.
The optimal dimensions of the 3-DoF Hybrid Manipulator are obtained using GA. In these, the design variables are L1 and L2 and the objective function is Maximum GCI. The GA is converged for 79 number of iterations and the obtained optimal dimensions are L1 = 0.494, L2 = 0.939 and GCImax = 0.6034. The solution convergence of GA is shown in Fig.4.
Conclusions
In this paper, the joint angles of the manipulator are obtained with the help of inverse kinematic analysis of the 3-DoF hybrid manipulator. The hybrid manipulator’s workspace is found by rotating the link AB about Y-axis to 180o. The mean GCI for the said workspace is 0.69, whereas the maximum value of GCI = 0.51 which is free from singularities, and the minimum value of GCI is 1.2225e-04 which is closer to singularities. Optimal dimensions of 3-DOF hybrid manipulator are found using GA by considering GCI as objective. The obtained optimal dimensions are L1 = 0.494 m, L2 = 0.939 m and the maximum value of objective function is GCI = 0.6034.
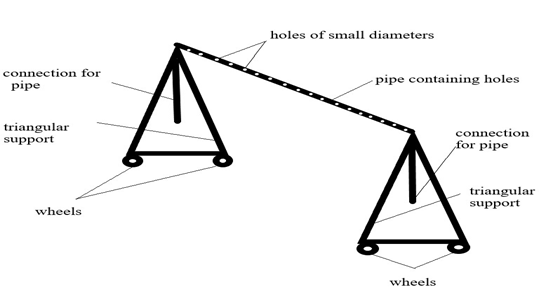
Fig.1. A 2 DoF Manipulator Fig.2. Schematic diagram of 3-DoF Hybrid Manipulator
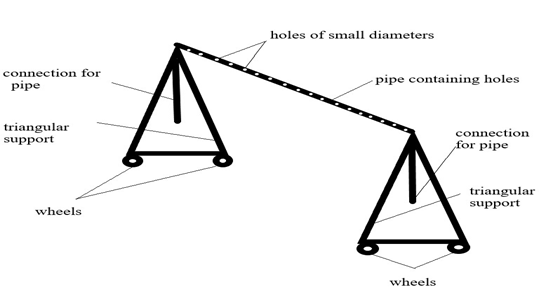
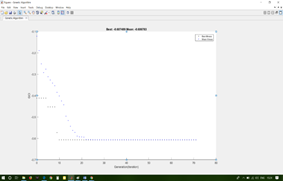
Fig.3. Workspace of 3-DOF Hybrid Fig.4. Convergence of GA
How to Cite
Article Details
Hybrid Manipulator, Inverse Kinematics, GCI, GA
[2] Chunxu Tian, Yuefa Fang, Sheng Guo, “Structural synthesis of a class of 2R2T hybrid mechanism”, Chinese Journal of Mechanical Engineering, 29 (4), 703-709 (2016).
[3] Hamid Rakhodaei, Ph. D work, “Design and Analysis of a 9 DOF Hybrid Parallel Robot”, school of mechanical engineering, University of Birmingham, UK, 18-201 (1998).
[4] Gosselin, C. and Angeles, J. “Singularity analysis of closed-loop kinematic chains” IEEE Transactions On Robotics And Automation, 6(3), 281-290 (1990).
[5] Chablat, D. and Wenger, Ph. “Working modes and aspects in fully parallel manipulators” to appear in Proc. IEEE International Conference of Robotic and Automation, 3, 1964-1969 (1998).
[6] S. Shankar Ganesh, A. B. Koteswara Rao, Sanjay Darvekar, “Multi-Objective Optimization of a 3 – DOF Translational Parallel Kinematic Machine”, Springer – Journal of Mechanical Science and Technology, 12, 3797 – 3804 (2013).
[7] Sanjay Darvekar, A. B. Koteswara Rao, S. Shankar Ganesh, K. Ramji, “Optimal Design and Development of a 2 – DOF PKM – based Machine Tool”, Springer – International Journal of Advanced Manufacturing Technology, 67, 1609 – 1621 (2013).